增加外部轴(导轨),许多同学都觉得一脸懵逼,那么若遇到要增加外部轴(导轨)的状况,咱们该怎们做?
1、体系key要有外部轴选项,而且用该key做好体系,如下(下图示例为能增加3个外轴驱动)
9、在操控面板-装备,主题挑选motion里,arm下能够修正外轴上下限,导轨的单位是米
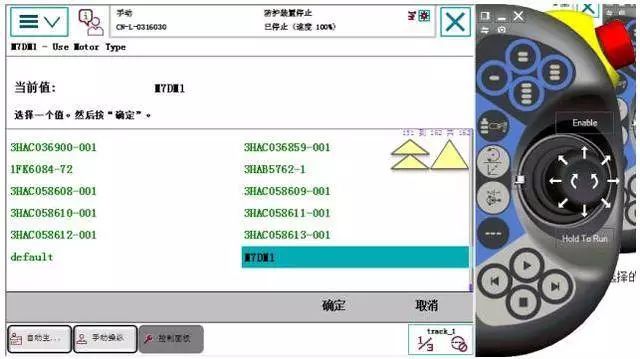
12、在操控面板-装备,主题挑选motion里,找到motor,能够修正挑选的motor-type
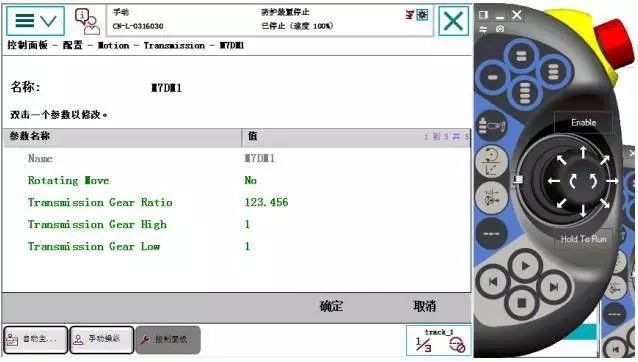
13、在操控面板-装备,主题挑选motion里,找到transmission,能够修正减速比
文章出处:【微信号:指南车机器人科技,微信大众号:指南车机器人科技】欢迎增加重视!文章转载请注明出处。
拓宽其免费的Wizard简易编程软件的使用规模 /
操控体系,侧重重视于运动学算法和轨道规划算法的完成和测验。LabVIEW作为一个关键技术,在项目中扮演了中心人物
伺服驱动器经过EtherCAT转profinet网关与西门子PLC1200衔接 本事例EtherCAT转profinet(Profinet转EtherCAT)网关
的运营本钱、人力本钱还在逐渐的提高(如:作业场所的租金、职工的薪酬、社保公积金、节假日福利等)。 现在的智能电话
I/O板信号设定过程简析 /
衔接的长途I/O的IP地址即PROFINET转EtherNet网关ethernet端的IP地址; 10、
一个链接; 11、设置好从站IP(本例为192.168.0.5)厂商ID为
的同学,可能对程序内的使命、模块、例行程序等概念不是特别了解,这儿简略总结了一下
程序结构总结 /
几种根本的运动原理。 要分辩根本图形,视觉模型要能分辩圆形,方形和三角形。 有了这两点,
就根本上能核算开模和注塑这种简略的作业了。要代替人类的作业,还要进一步学习。
的例行程序可大致分为三种类型;程序、功用、中止,本章首要共享一下程序和功用的用法。
程序和功用的使用 /
越来越遭到我们的重视,其间滚动操控是其重要组成部分之一。步进电机芯片作为一种常用的操控芯片,被大规模的使用于儿童陪护



